2009.02.27 2009.02.27 |
 |
 |
||||||||||||||||||
|
胸には自律歩行用の2個の距離センサー(シャープ製) |
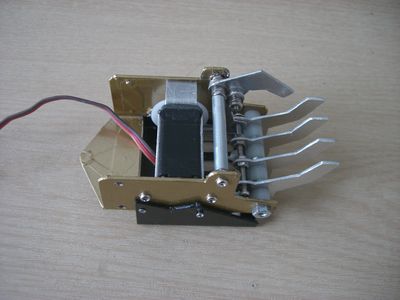
ハンドの制作は、「RoboZak奮戦記」を参考にしました。 |
ハンド部分左右に取り付けた距離センサー(自作ハンドと交換して使用)。
|
||||||||||||||||||
 |
 |
 |
||||||||||||||||||
|
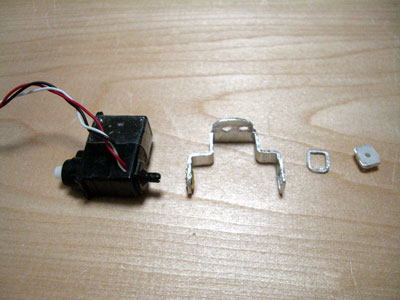
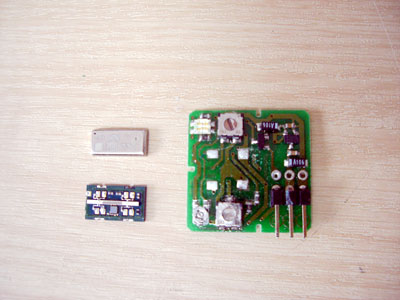
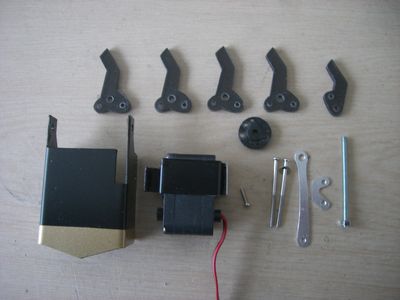
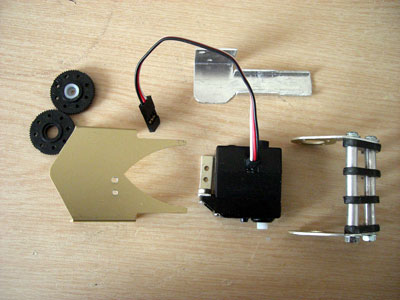
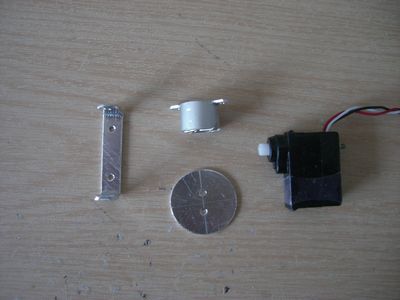
純正のサーボは46g、改造サーボは27gでした。
|
今回使用したサーボは、左の写真の真ん中のサーボです。 |
今回制作したハンドの重さは42gで、小型軽量に出来ましたが、小さい物しか掴めない。 |
||||||||||||||||||
 |
 |
|
||||||||||||||||||
|
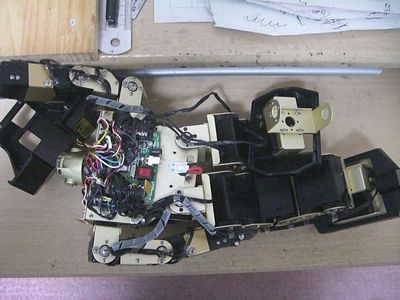
右脇に取り付けたジャイロセンサー切り替え用(ピッチ軸、ロール軸)の超小型リレーと赤色LEDです(プログラムで設定して、リモコンで切り替えます)。
|
音声認識命令で自律歩行停止時、後ろからだとLEDが見えないため頭部に設置した音声認識用確認LED。 |
胸に2個、ハンドに2個、4個のシャープ製距離センサーを使っていましたが、消費電流が多いのとADポートを開けるために、頭の中に超音波距離センサーを入れました。 カバーを付ける前です。 |
||||||||||||||||||
|
|

|
 |
||||||||||||||||||
|
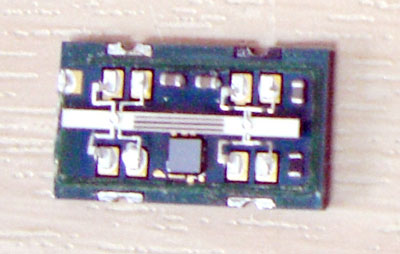
超音波距離センサーは、ロボザックのコントロール基盤ではAD変換の性能が悪いのか、使いづらかったので、オペアンプ(LM386n)で、3.5倍程度の増幅率で使用しました。
|
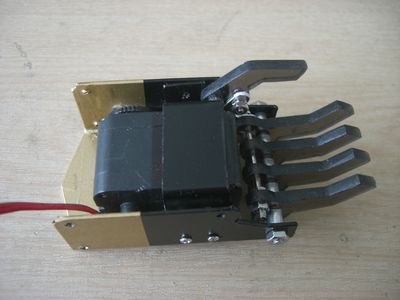
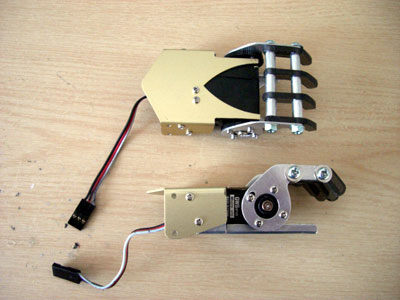
12月にハンドを作り直しました。 |
ハンドの重さは、サーボを変更したので53gになりました。 過電流防止回路を作成しようと思っています。
|
||||||||||||||||||
|
|
*ADポートが足りないです。
*ロボザックに付属した加速度センサーは電圧が下がると数値が変動するが、秋月電子で購入した加速度センサー(1,000円)は、ほとんど変動がない。 |
|||||||||||||||||||
|
|
|
|
||||||||||||||||||
|
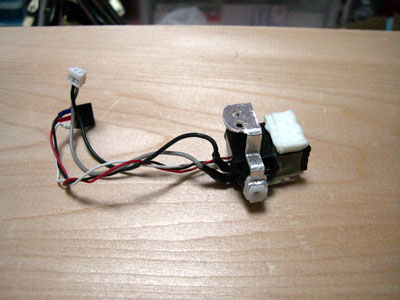
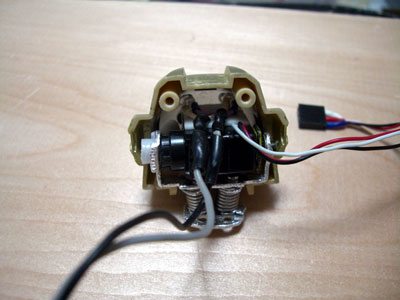
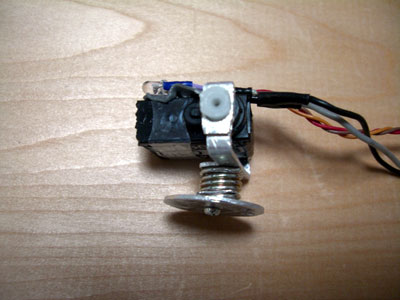
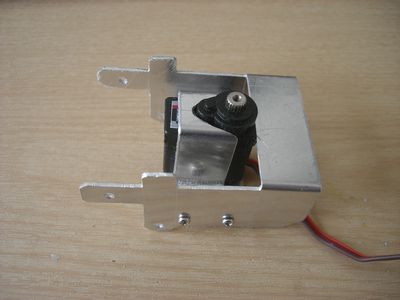
最初に動作した部品(試作品3個目)。 |
左の部品をサーボモーターに取り付けた状態。 |
転倒等による衝撃から保護するため、首の部分にコイルスプリングを使用。
|
||||||||||||||||||
|
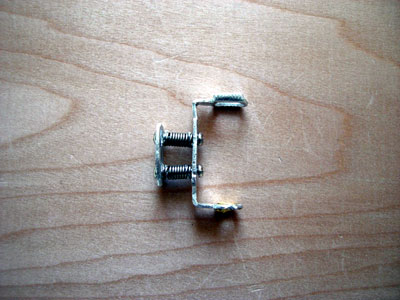
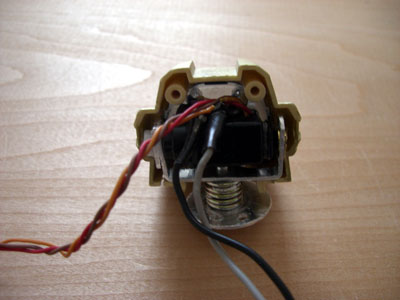
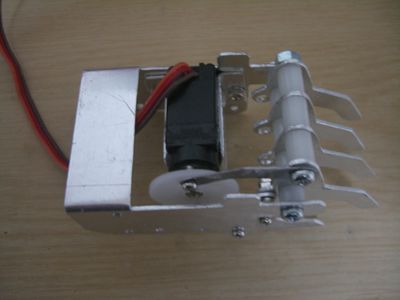
上の写真の太めのバネに変更しました。
|
ロボザックの頭を上下させたいなーと思っていましたが、元旦にアイディアが浮かび作成していましたが、9日の夜に完成しました。 |
YouTubeに動画を掲載しました。 ラジオ体操第2のビデオ(モーションを改良)
|
||||||||||||||||||
|
1月13日、昨日まで動作テストをした結果、上の写真よりもっと太いバネに変更しました。
|
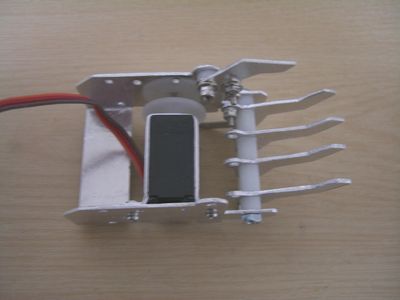
太いバネ1本に変更して、支持金具も作り直しました。 |
 左の写真の頭部を支持するバネをアルミに変更しました。 もっと良いものができないか思案中です。 |
||||||||||||||||||
 |
 |
 |
||||||||||||||||||
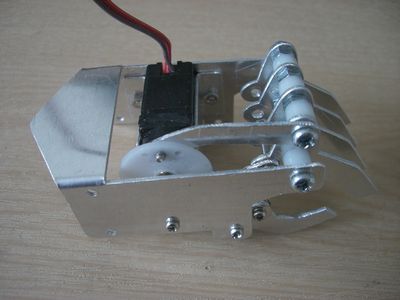
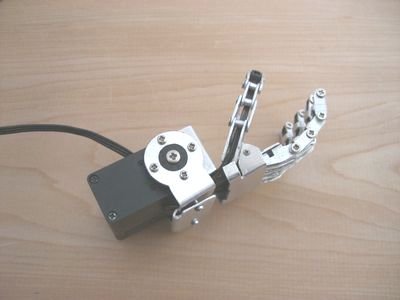
| 2010.02. 1月下旬から制作していたロボットハンドの右が、もう少しで完成です。 YouTubeに動画を掲載しました。 ロボザック用ゴッド・ハンドテスト |
メリッサのゴッドハンドを参考にしました。 |
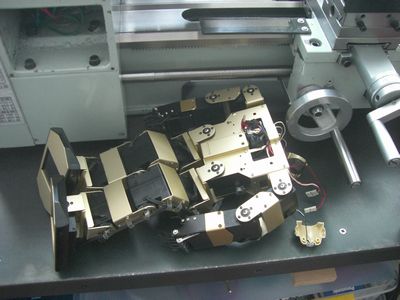
こんな道具で作るので正確なものができません。 |
||||||||||||||||||
 |
 |
 |
||||||||||||||||||
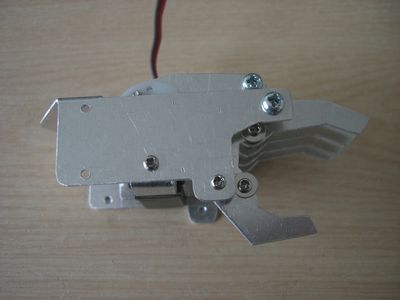
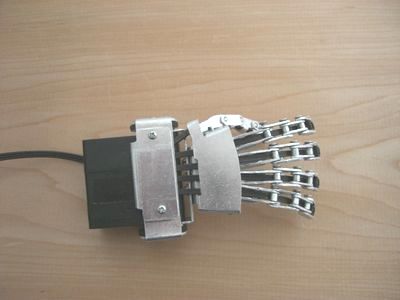
| 卓上ボール盤くらいは購入するべきでした。 ヤスリ・ドリル・万力・・・だけでは・・・限界がある・・・・・ |
2月17日右手が完成しました。 | |||||||||||||||||||
 |
 |
 |
||||||||||||||||||
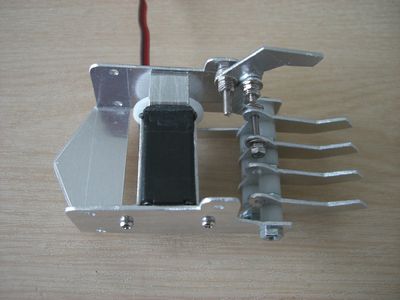
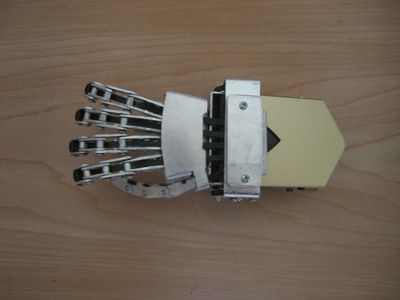
| テスト用のハンド |
テスト用のハンド | |||||||||||||||||||
 |
 |
 |
||||||||||||||||||
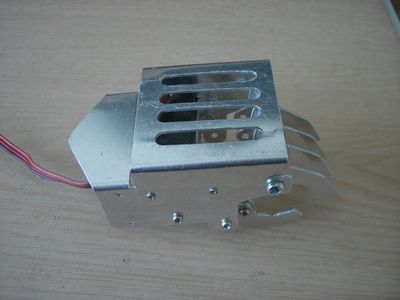
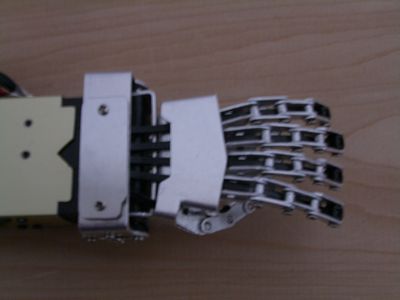
| 2010.03.30 ロボザックのハンド完成 |
テスト用のハンドより良くなりました。 CNCフライス盤があると正確なものができると思いますが・・・・・ |
YouTubeに動画を掲載しました。 |
||||||||||||||||||
|
 |
 |
||||||||||||||||||
| ロボザックには、このハンドの方が合っているようです。 |
2010.05.23 左の写真のハンドをビストンnano用の小型サーボに交換しました。 | サーボが小型になって手の大きさも若干小さくなりました。 | ||||||||||||||||||
 |
 |
 |
||||||||||||||||||
| 2010.06.16 頭部の上下動作用の部品を作成しました。 上の写真の部品と耳部分支持用の小ネジ(1.7M)、小管(ネジの支え用、田宮のギヤセットに入っていた内径2mm、)、簡単な構成ですが、一月の作成開始から数ヶ月もたちました。 |
2010.06.16 左の部品を組み立てました。 こうやって見ると簡単ですが・・・・・・ |
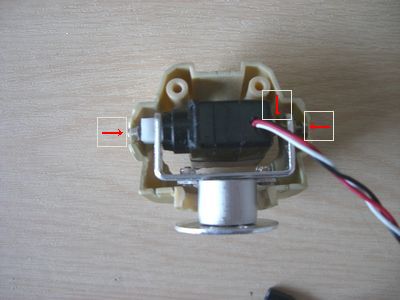
2010.06.16 サーボモーターとともに組み込んだ様子です。 写真の赤矢印の箇所は1.7Mのネジを利用して、頭部、耳穴の箇所とサーボの軸を支えています。 これにより、前転などの頭部に衝撃が加わる、モーションが安全になりました。 |
||||||||||||||||||
 |
 |
左の写真は頭の上下左右動作に使っている小型のアナログサーボです。 このサーボのほかに、これより少し大きいアナログサーボを手の動作に使用しています。 アナログサーボは電源ONで一瞬動いてしまいます。 この動きを止める対策のページを紹介します。 上記の対策のページから、サーボモーターの信号線を10kΩの抵抗でプルアップすればよいことになります。 私は、左の写真の矢印のように接続端子の信号線と電源線に10kΩの抵抗を差し込んでいます。(横着して簡単に出来ました) |
||||||||||||||||||
| 2010.06.16 以前の首と比べ、アルミパイプを使ったので格段に良くなりました。 |
YouTubeに動画を掲載しました。 |
|||||||||||||||||||
|
これにより・・・ ロボザックの音声認識命令の後、うなずき動作をしてからモーション動作をするように設定しています。 |
||||||||||||||||||||
| 6月9日から頭部の上下動作の改良をしてきましたが、6月16日に完成しました。 昨年から、半年くらい考えていた、頭の上下動作ですが、試作を始めた1月9日から改良しながらの半年、今回、満足するものが完成しました。 |
||||||||||||||||||||